
Buen día a todos. Continuaremos con el ensamblado del Mecanismo de Theo Jansen v5.0 Parte 2. Si no visitaron la primera entrada, dejo el link:
También agrego 2 videos para que se aprecie el ensamblado de la pata derecha y la pata izquierda:
Ensamble de Theo Jansen

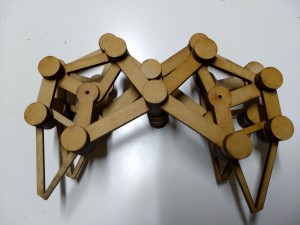
Al finalizar el artículo anterior se cuenta con 4 patas izquierdas y con 4 patas derechas ya ensambladas, como el de la foto anterior.
Por el momento, solo se utilizará 1 pata izquierda, 1 pata derecha, un perno de 30mm con tapa y la pieza tipo leva.

Se pega el perno y la leva, cuidando que el disco recortado apunte hacia abajo. En la segunda y tercera foto, se observa parcialmente el ensamble. Finalmente, la pieza queda como en la cuarta foto.

Partiendo del ensamble realizado, Se desliza la pata izquierda por los orificios de los brazos sueltos hasta llegar a la leva. Realizamos la misma acción con la pata derecha.

Se agrega un anillo separador grande que se coloca encima de la pata derecha. En la segunda foto hay que prestar atención a que la leva se ha girado hasta que apunte hacia abajo. Es de suma Importancia respetar esto. Ya que el conjunto de estas piezas genera el cigüeñal principal del mecanismo. Se coloca la pieza de los 3 orificios encima del anillo separador. La cuarta foto da la perspectiva desde arriba.

Finalmente, se pega una tapa al perno de 30mm y a la pieza de los 3 orificios. Se muestra la perspectiva desde arriba.

Ahora se agregarán 1 perno con tapa de 30mm, 2 patas más (1 izquierda y 1 derecha), y 2 anillos separadores grandes.

Se coloca el perno de la misma manera que en el juego de patas anteriores. NOTA: (En la segunda foto se observan discos adicionales abajo del perno pero únicamente fueron colocados para que la pieza no se cayera.) Inmediatamente de la pieza de los 3 orificios se colocan los 2 anillos separadores, los cuales darán la altura al siguiente par de patas.

Colocamos las patas en el perno.

Finalmente, pegamos una tapa al final del cigüeñal. Se debe asegurar que el pegado del cigüeñal sea rígido y que no se deforme pero que permita girar libremente los brazos de cada una de las patas.

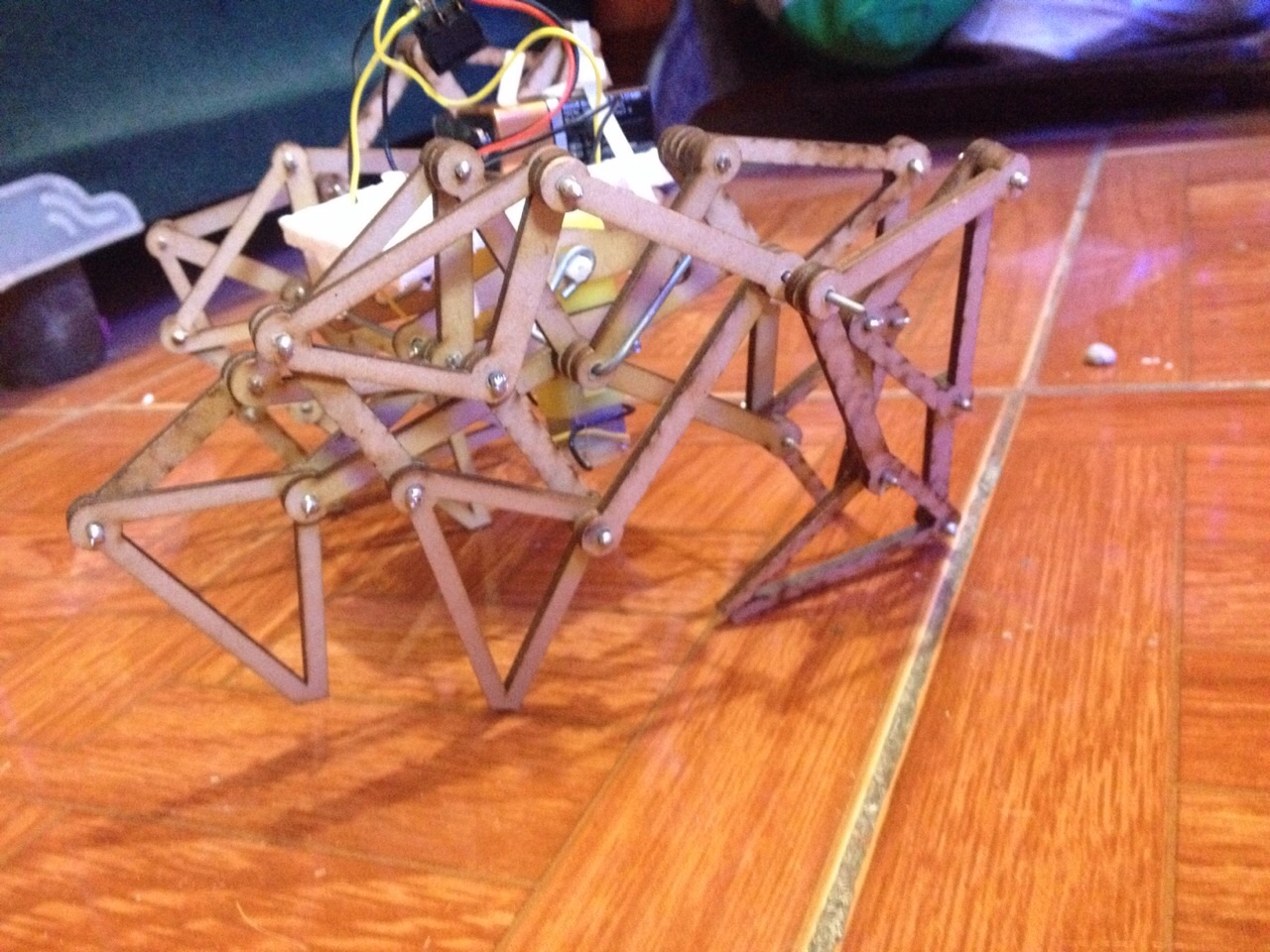
Una foto final del ensamble.
Por el momento, finalizaremos el artículo y quedaremos pendientes al siguiente ensamble.
Hasta el próximo…