
Introducción
Buen día a todos. Este será el primero de varios artículos que escribiremos con las siguientes temáticas: Mecanismos, Electrónica, Software y Automatización. En ellos podrán observar pequeños tutoriales para realizar sus proyectos electrónicos o de prototipado. Si tienen algún tema adicional que quieran sea expuesto; Por favor, Déjenos un comentario y lo evaluaremos. Sin más por el momento y esperando que les sea de gran utilidad; Iniciamos con el ensamblado del Mecanismo de Theo Jansen v5.0 Parte 1.
Antecedentes de Theo Jansen
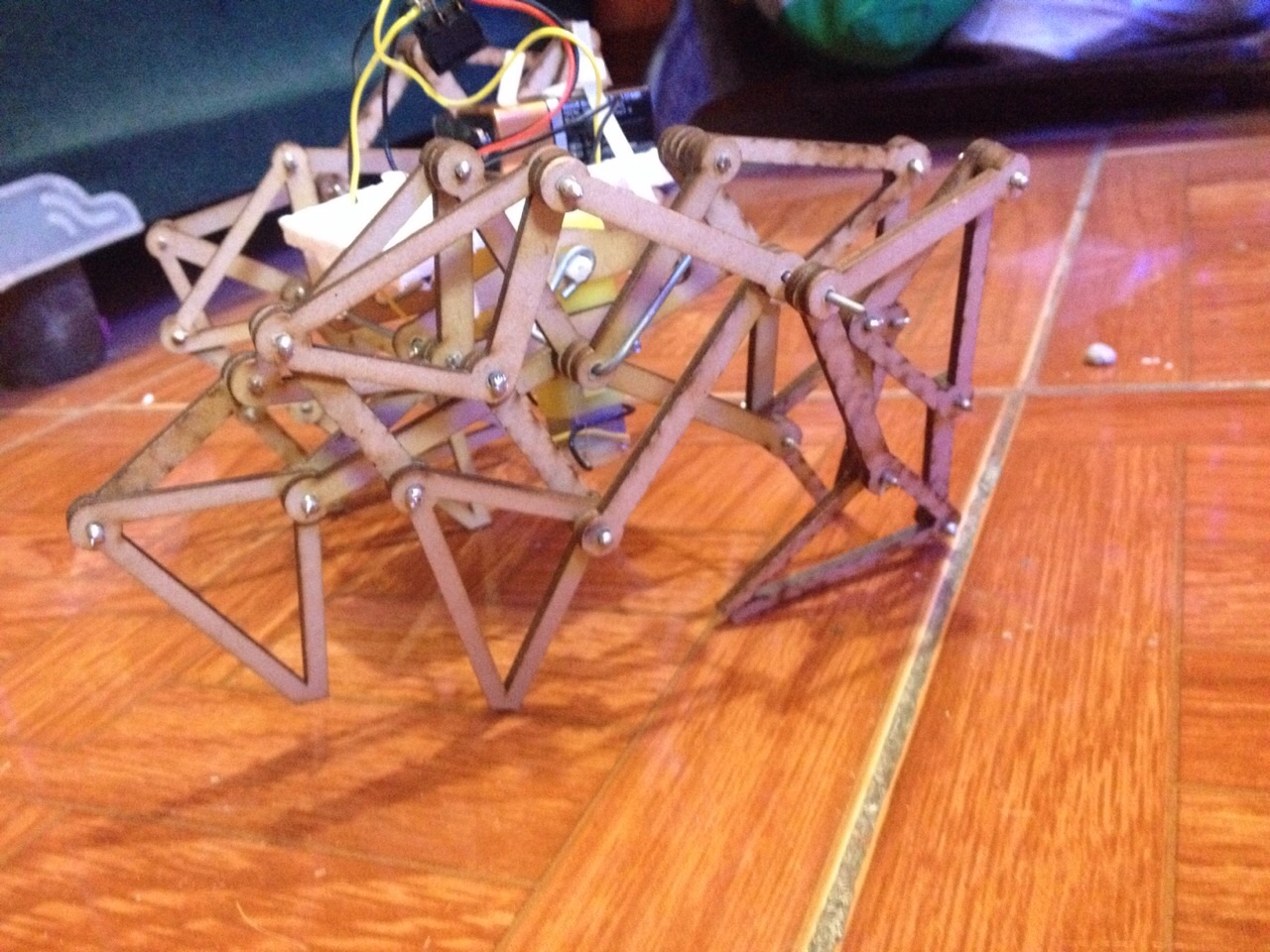
Theo Jansen es un artista Alemán que ideó uno de los mecanismos más sencillos y a la vez complejos de tiempos recientes. El cual simula el movimiento de las rodillas de los animales a la hora de caminar. Si tienen tiempo les dejamos un video de una de sus creaciones (En la red, se encuentran muchos más videos.)
Este mecanismo Theo Jansen nos cautivó inmediatamente, por lo que, diseñamos un modelo similar pero que fuera controlado por motorreductores para aplicaciones de robótica. Y de ahí, la creación de este artículo.
Materiales
Piezas de Kit de Mecanismo de Theo Jansen
Pegamento Blanco
Instrucciones de Theo Jansen
En esta foto podemos apreciar las piezas del mecanismo (sin varillas y sin pernos) del Kit de Mecanismo de Theo Jansen:

Para ensamblar un perno, se puede ver las fotos y utilizamos pegamento blanco.
Los pernos vienen en 3 tamaños distintos: 30mm, 18mm y 12mm. Para una pata se requieren 3 pernos de 12mm y uno de 18mm.
Utilizaremos estos pernos para unir los distintos componentes de una pata. NOTA: (Únicamente está pegado 1 solo disco porque falta poner las piezas.)

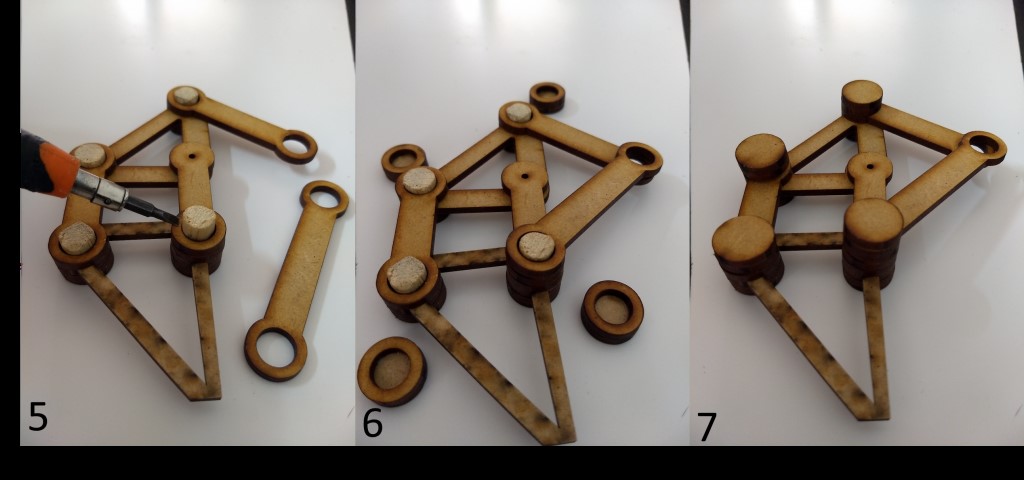
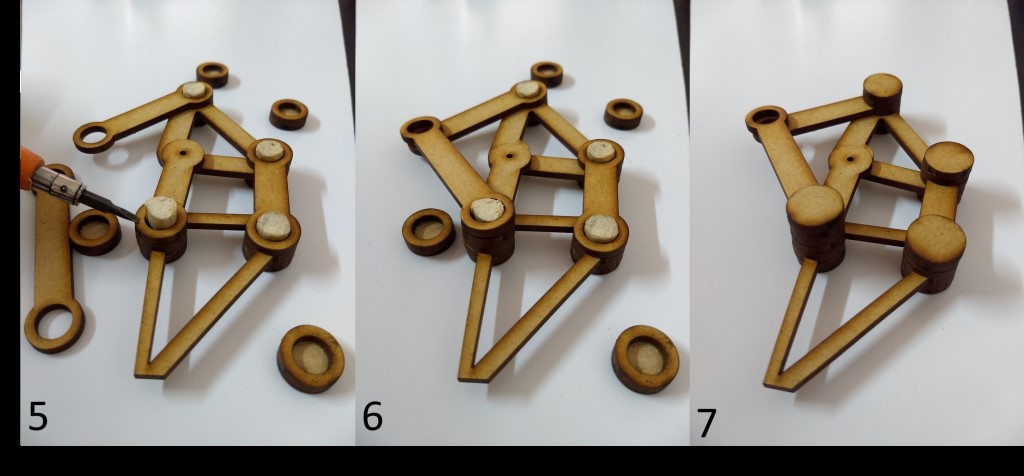
Por el momento concentrémonos, en la pata izquierda y veamos su ensamble. Prestemos atención que el desarmador señala el lado angosto de la pieza triangular y así debe ser colocado; es decir; apuntando hacia el lado inferior.
NOTA: (El perno de 18mm es el del lado derecho inferior.)

En esta secuencia, se señala con el desarmador el anillo separador. Este cumple la función de dar altura suficiente al último brazo. Finalmente, se pegan las tapas y se deja secar.

La pata derecha se ensambla en espejo a la izquierda. Se requiere armar 4 patas derechas y 4 patas izquierdas.
Por el momento, finalizaremos el artículo y quedaremos pendientes al ensamble. Hasta el próximo.